Image Acquisition and Overlap
Image capture
Depending on the type of object/scene and the type of camera used, the following acquisition patterns are used:
Type of Scene | Image Acquisition |
|---|---|
Object | Circular acquisition around the object |
Flat surface | Regular grid acquisition |
Corridor | Panoramic acquisition along corridor |
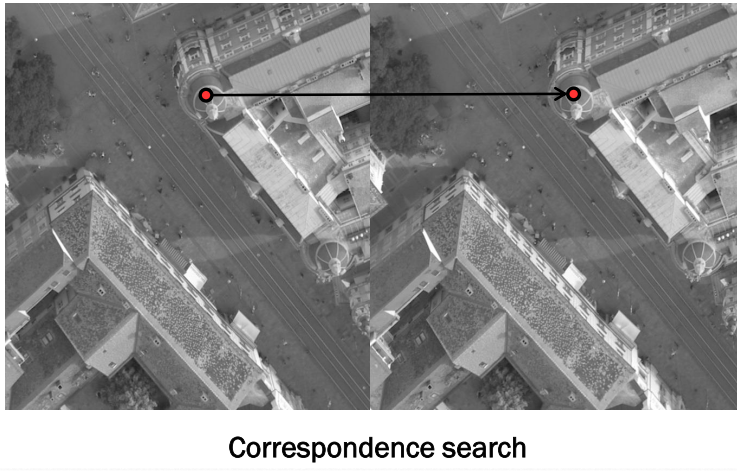
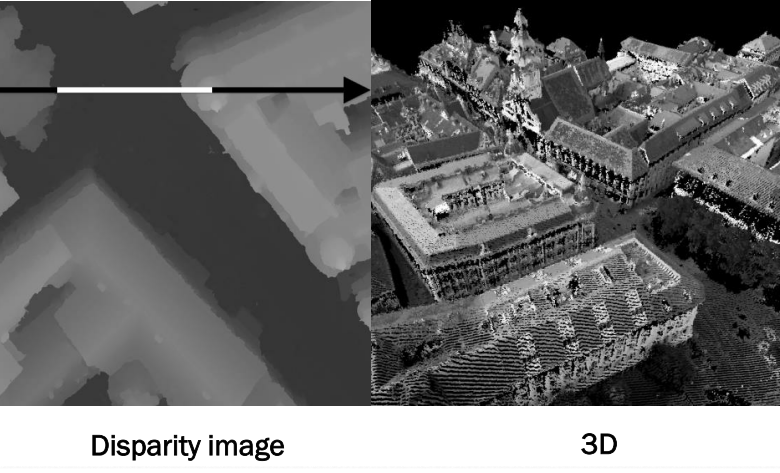
3D information is extracted from overlapping images based on the stereoscopic effect. In SURE, Dense Image Matching is used to determine which pixels from each stereo pair represent the same point in 3D space. High image overlap enables the generation of the 3D point cloud based on Multi-Stereo Triangulation, which increases the reliability of the points generated. Thus, the final surface quality is not only influenced by the orientation data quality but also by the number of overlapping images and their similarity.
We strongly recommend that every point on the surface of interest is observed by 5 images or more (minimum 3 images). Furthermore, images should be taken at a similar image scale and thus images should be captured at similar distance to the object.
For details on image overlap of Aerial images, please see the Nadir Image Overlap page (also useful for Oblique imagery).
Scenarios
In SURE, the following Scenario Presets are available:
Scenario | Image Capture Configuration |
|---|---|
Default | Irregular and unknown image distributions |
Aerial Oblique | Regular airborne grid acquisitions with “Maltese cross” configuration systems |
Aerial Nadir | Regular airborne grid acquisitions in Nadir configuration |
For the latter two scenarios, the regular structure is exploited in order to identify a minimum set of stereo models.