Nadir Image Overlap
This article contains recommendations on image overlap of Nadir imagery following regular flight patterns. The flight planning of oblique camera systems should also be executed according to their Nadir camera.
Images are typically acquired in strips and parameterized by a forward (in-strip) and sideward (cross-strip) overlap percentage between the images. We highly recommend flying in a chessboard pattern - so that images in adjacent strips are at the same height. This is beneficial for coverage and processing time.
Within this article, multiple scenarios and recommendations are given for standard large frame cameras (Vexcel Ultracam, Leica DMC) with a typical opening angle of 60-70 degrees across flight direction. The opening angle plays a key role, as it influences the extent of occlusions occurring towards the image border. For cameras with other opening angles using the building lean occlusion in the central image area, more specific definitions can also be given in a more custom way.
For the simplified case of standard cameras, the following typical scenarios are described in detail: 60/30, 80/30, 80/60, 80/80 as well as a more generic approach using the Central Image Contribution.
In-strip/cross-strip Overlap (%) | Key Attributes | Recommended Scene Type |
|---|---|---|
60/30 | Minimum coverage required. Central Image area is only covered by two images | Open landscapes from high altitudes |
80/30 | Recommended minimum coverage. Four suitable stereo pairs per image | Open landscapes from high altitudes |
80/60 | Reduces cross-strip stereo occlusions | Urban scenes without high-rises |
80/80 | Greatly reduces cross-strip stereo occlusions | Urban scenes with high-rises |
Minimum configuration: 60/30
In the past, Nadir images were acquired with a 60/30 overlap to enable high-quality Aero-triangulation while saving on expensive film and processing costs associated with analog image capturing.

Traditional: 60/30 overlap - Central image area (red) is only covered by 2 images (one stereo model)
The missing redundancy reduces output quality and data completeness.
As seen in the illustration above, no redundancy or overlap with more than two images is available in the central image area. For dense matching applications, this area is also of interest. Although SURE can generate data within this area, the software increases the ground sampling distance (GSD) of the final DSM to have more than one observation per cell, increasing redundancy. This adjustment facilitates the proper filtering of the resulting point clouds. The 60/30 configuration is supported for traditional datasets; however, at least 80% forward overlap is recommended for new captures.
Recommended minimum configuration: 80/30
Increasing the forward overlap to 80% reduces occlusions and improves redundancy without additional flight efforts (flight lines). Every image now has four suitable stereo partners, enabling multi-stereo triangulation, which improves outlier rejection and measurement precision. The substantial reduction in stereo occlusions (pixels not being observed in multiple stereo models) decreases data gaps and, subsequently, the need for interpolation. Moreover, the higher image similarity of the 80% forward overlap model boosts matching performance resulting in better edge recovery. This configuration is optimal for capturing open landscapes from higher altitudes. For scenarios with more varying topography (e.g., urban areas with buildings and more occlusions), an increase of the side-ward overlap is recommended to resolve stereo occlusions between the strips (e.g., streets perpendicular to the flight direction).

In the 80% in-strip, 30% cross-strip overlap configuration the central image area (red) is covered by at least 5 images (4 stereo models). The redundancy enables outlier filtering, noise and occlusion reduction.
Recommended for urban scenes without skyscrapers: 80/60
This setup helps reduce stereo occlusions between strips typically caused by the relief displacement effect of buildings and other objects. With an increase to 60% side-overlap, an additional stereo model between strips is considered (totaling 4 models in-strip and 2 cross-strip per image), which leads to the generation of more points in areas susceptible to stereo occlusions (e.g., ground-level surfaces adjacent to buildings). In turn, this overlap configuration also improves the True Ortho quality significantly, since correct points in front of building facades are essential for well-defined edges.
Recommended for urban scenes with skyscrapers: 80/80
This setup compensates the strong stereo occlusions caused by high buildings. This should be considered as soon as multiples buildings with more than e.g. 30 meters height are close to each other.
Generic approach
Within a generic approach for all kinds of cameras, the Central Image Contribution should be considered (also referred to as "net image", see image below). The central part of the image is defined by the area between the overlaps or the counter percentage (e.g. 60%/30% => the 40%,70% of the image center). The occlusions caused by the relief displacement of buildings (or any object) should be minimized within this Central Image Contribution - e.g. to less than 20 pixels. The effective maximum occlusion can be estimated using the opening angle between the edges of the Central Image Contribution and a maximum building height.
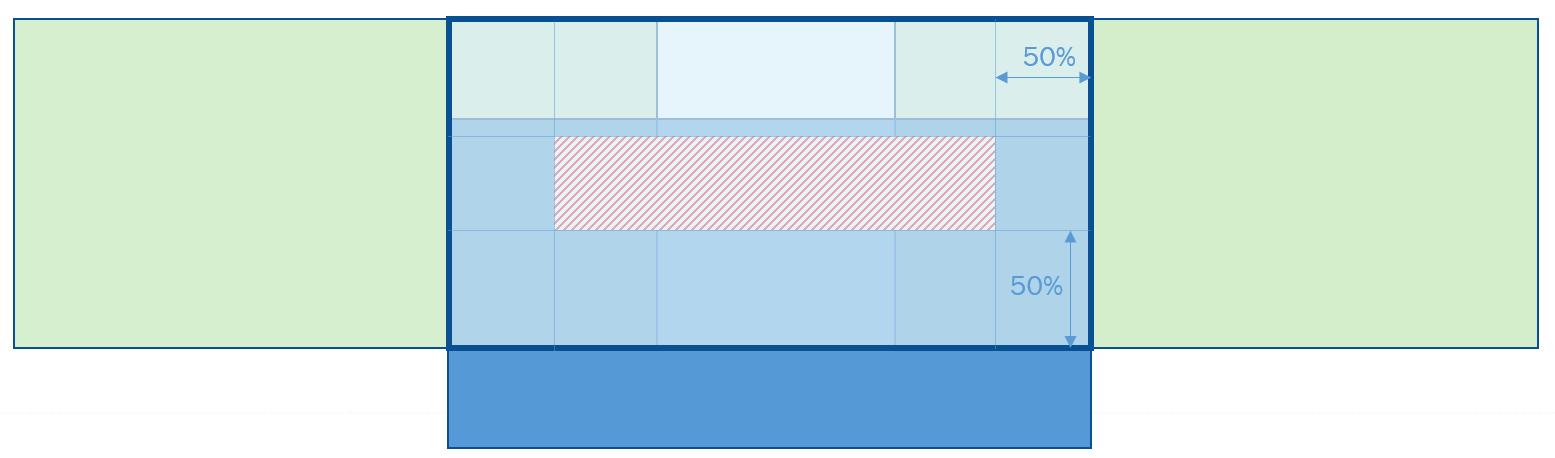
Central image Contribution area - the area of consideration to determine occlusion
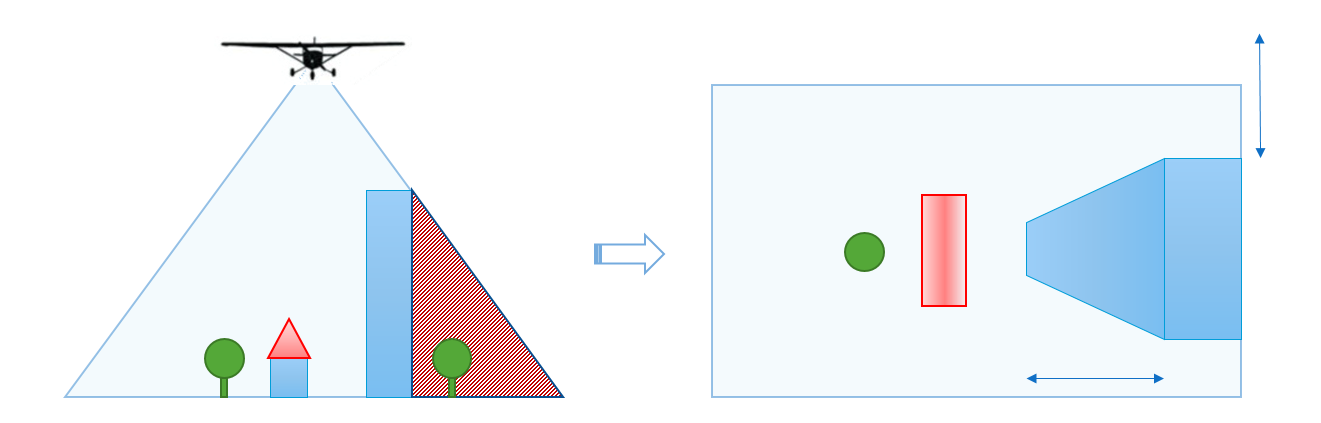
Occlusion - object occlusion leads to insufficient observations from multiple images