Scenario
Introduction
The scenario is the only mandatory parameter when creating a SURE project. Its role is to make sure that all internal algorithms are optimized for the input data given to the project.
The scenario parameter selection consists of 3 possible choices:
Aerial Nadir
Aerial Oblique
Default
Each scenario is configured to guarantee an automatic parametrization of the project, which fits a certain flight configuration and camera.
The default values for the processing parameters are chosen considering the particularities of the input data while ensuring an optimal process for the minimum hardware requirements and obtaining the best quality results. This page provides further instructions on how to adapt the default values to specific hardware or project requirements.
Choosing the Scenario
Scenario Aerial Nadir
The Aerial Nadir scenario is suitable for projects where the image acquisition is performed with large photogrammetric camera systems for which:
Images are captured in the Nadir direction (facing downwards with respect to the local tangent plane)
Image resolution is ≥ 60MP
Typical image formats are RGB, PAN, RGBI, and NIR
This scenario is designed for handling large-scale production, where data is captured using regular flight patterns with in-strip/cross-strip overlaps ranging from 60/30 to 80/80. This scenario also supports mixed flight overlaps or single flight strips (representative for corridor mapping).
The Aerial Nadir scenario in SURE implies:
Automatic handling of the stereo-model selection for various nadir flight patterns
Product output by default:
DSM
True Ortho
Default tile size: 2000 x GSD
Default processing quality level: Ultra
Scenario Aerial Nadir allows for specifying the in-strip and cross-strip overlaps. Setting the correct overlap for the given data is important to achieve the best stereo model selection, runtime, and output quality. For the cases with mixed overlap, it is recommended to specify the maximum overlap in-strip and in cross-strip direction.
The minimum value for the sideward overlap is 30%, according to the photogrammetric requirements of a flight. This value should be specified also for the case of corridor mapping projects (i.e. single strip projects).
In the cases of low overlap flights (less than 75% in-strip overlap and less than 50% cross-strip overlap), a GSD multiplicator of 2 will be applied to the size of the output DSM/True Ortho raster cell. This is automatically applied to guarantee the completeness of results.
Supported flight patterns:
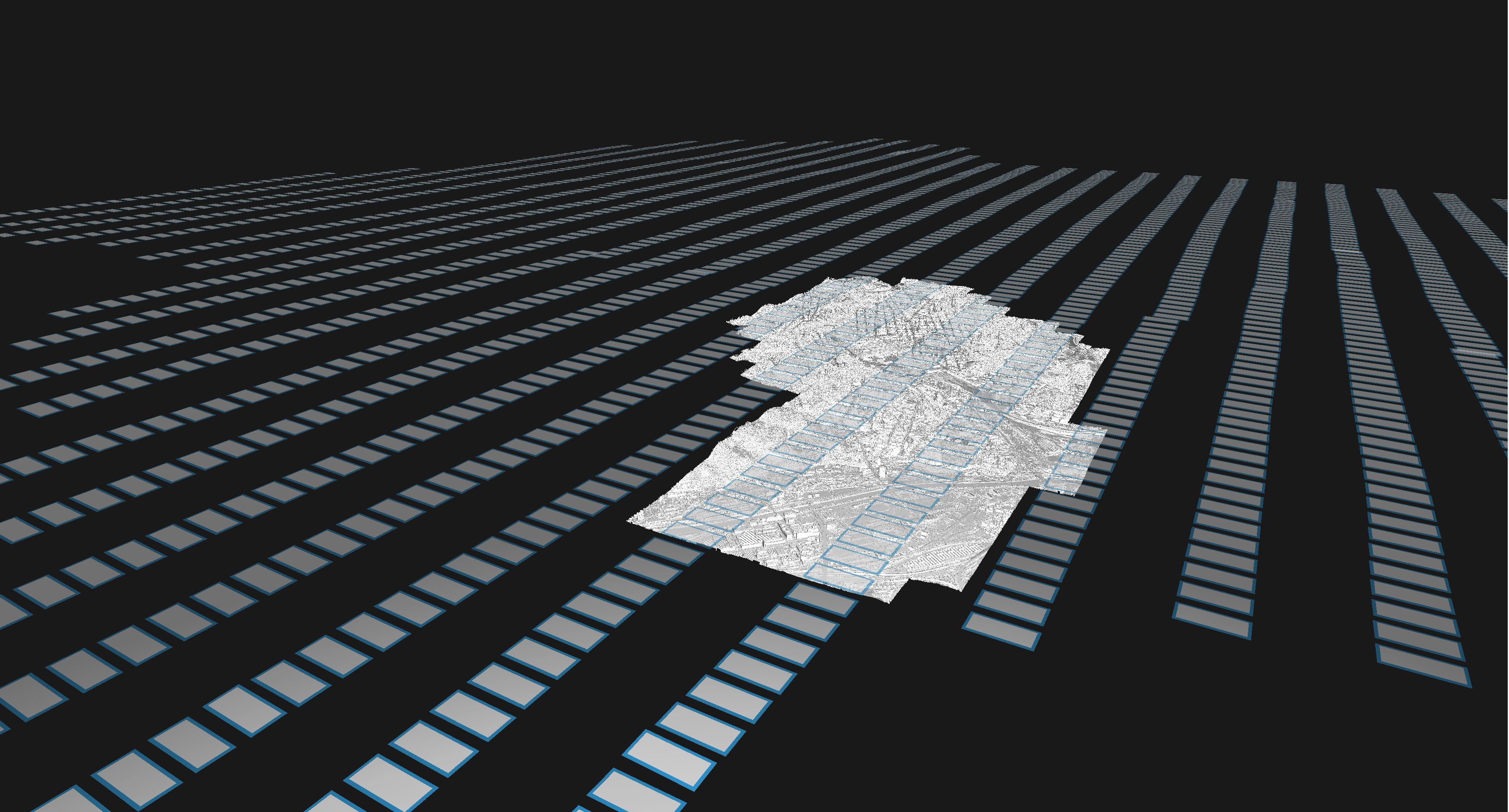
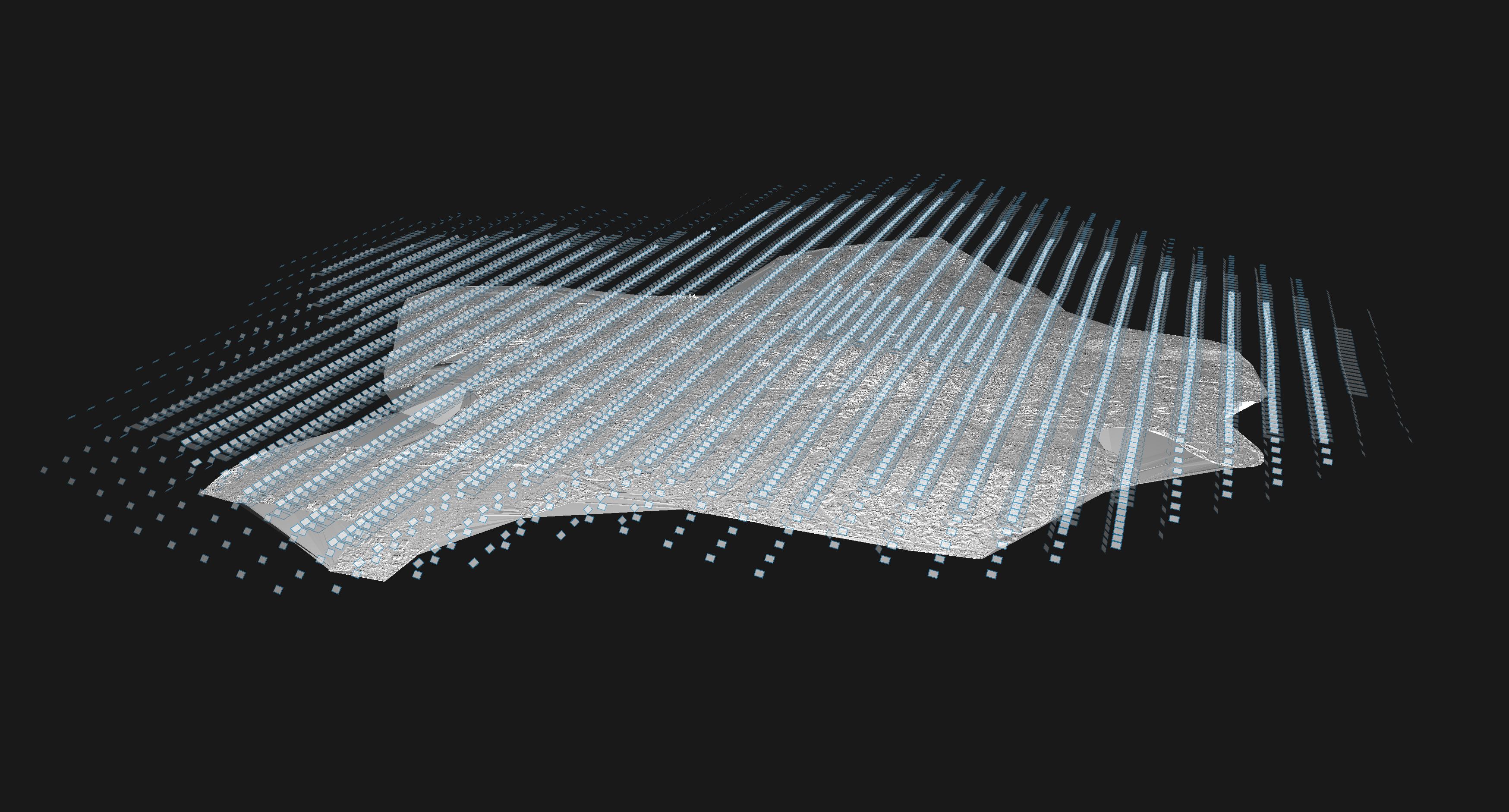
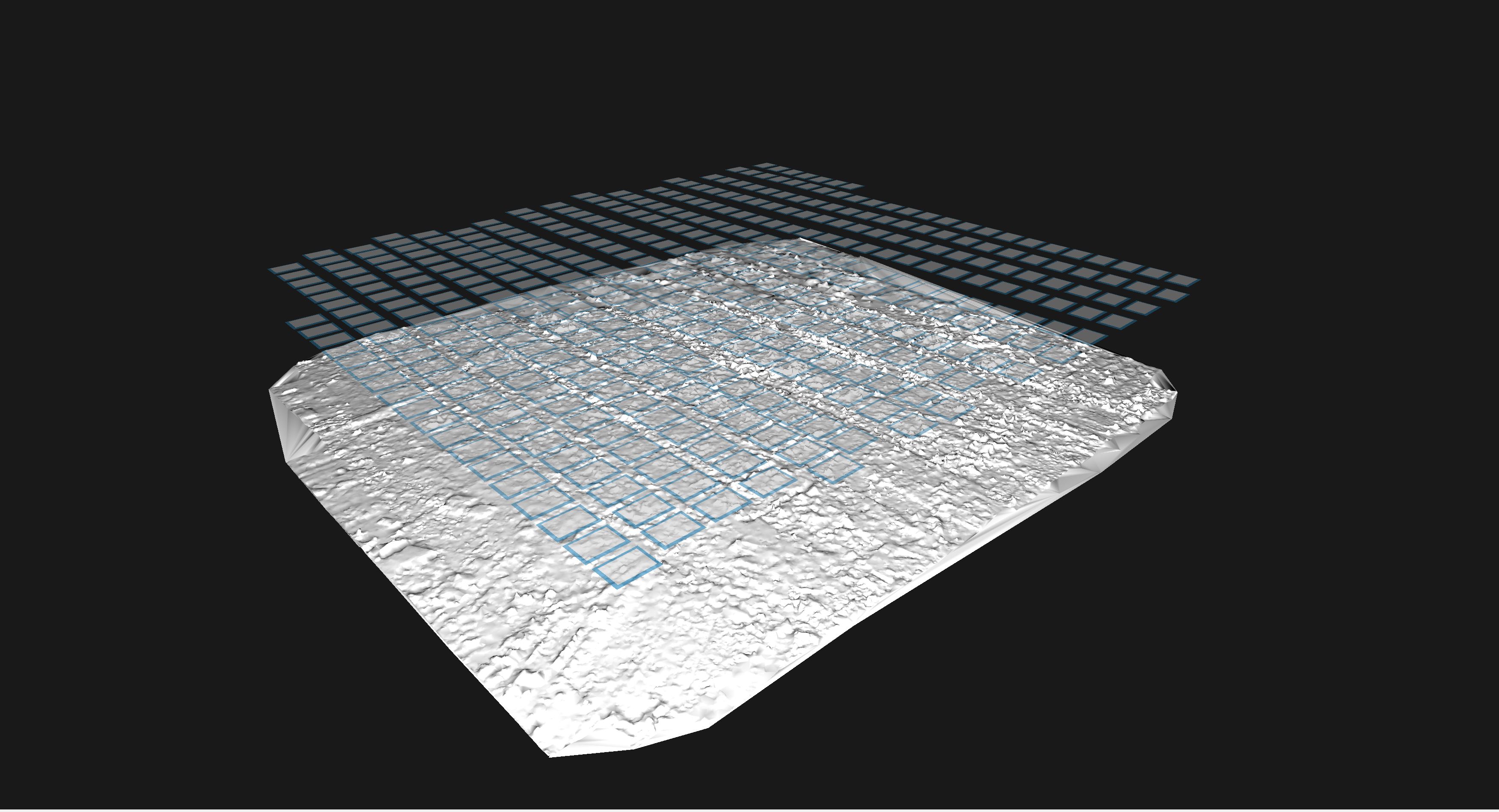
Aerial: Regular Chessboard (Grid) Flight Pattern
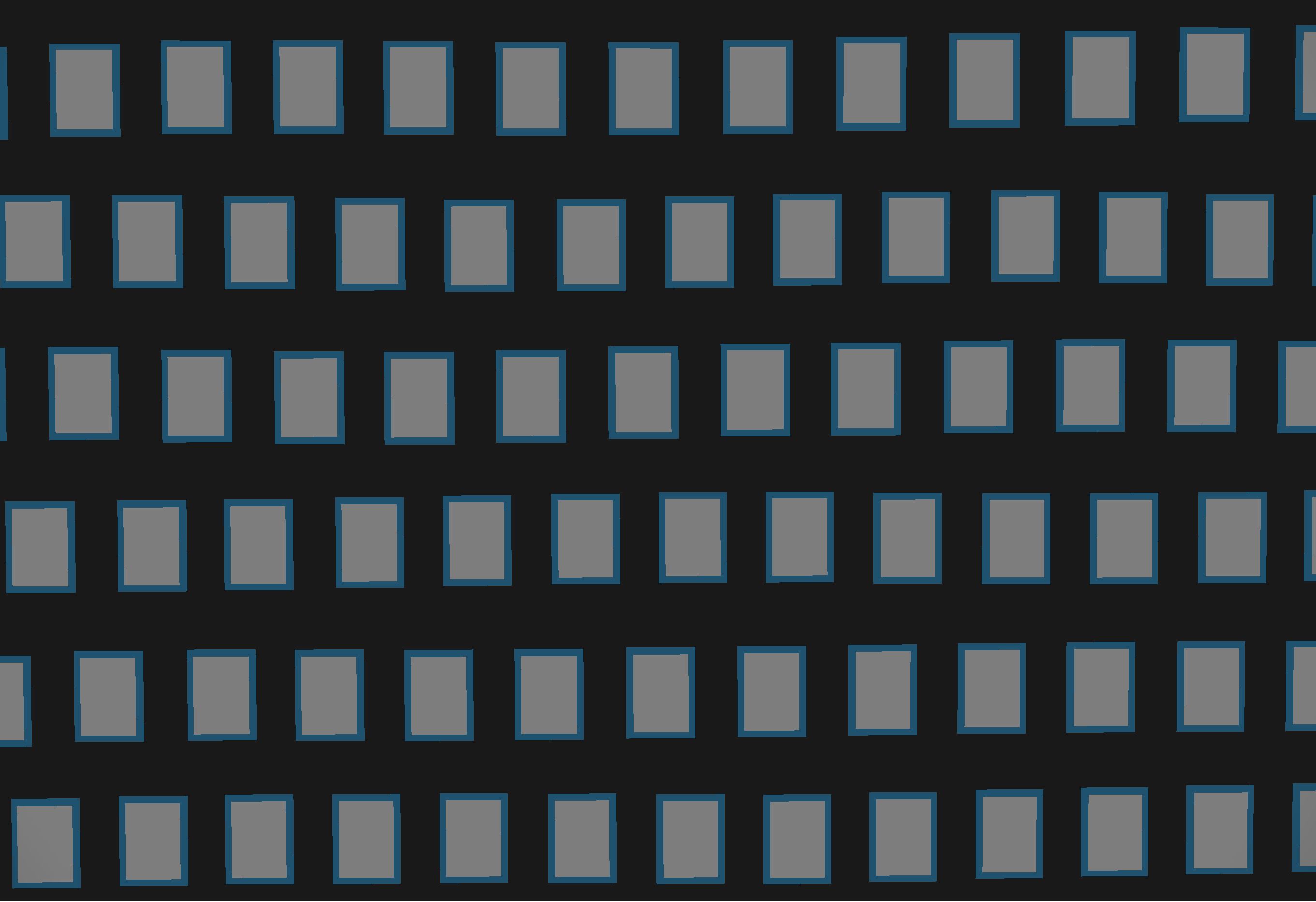
Aerial: Regular Non-Grid Flight Pattern
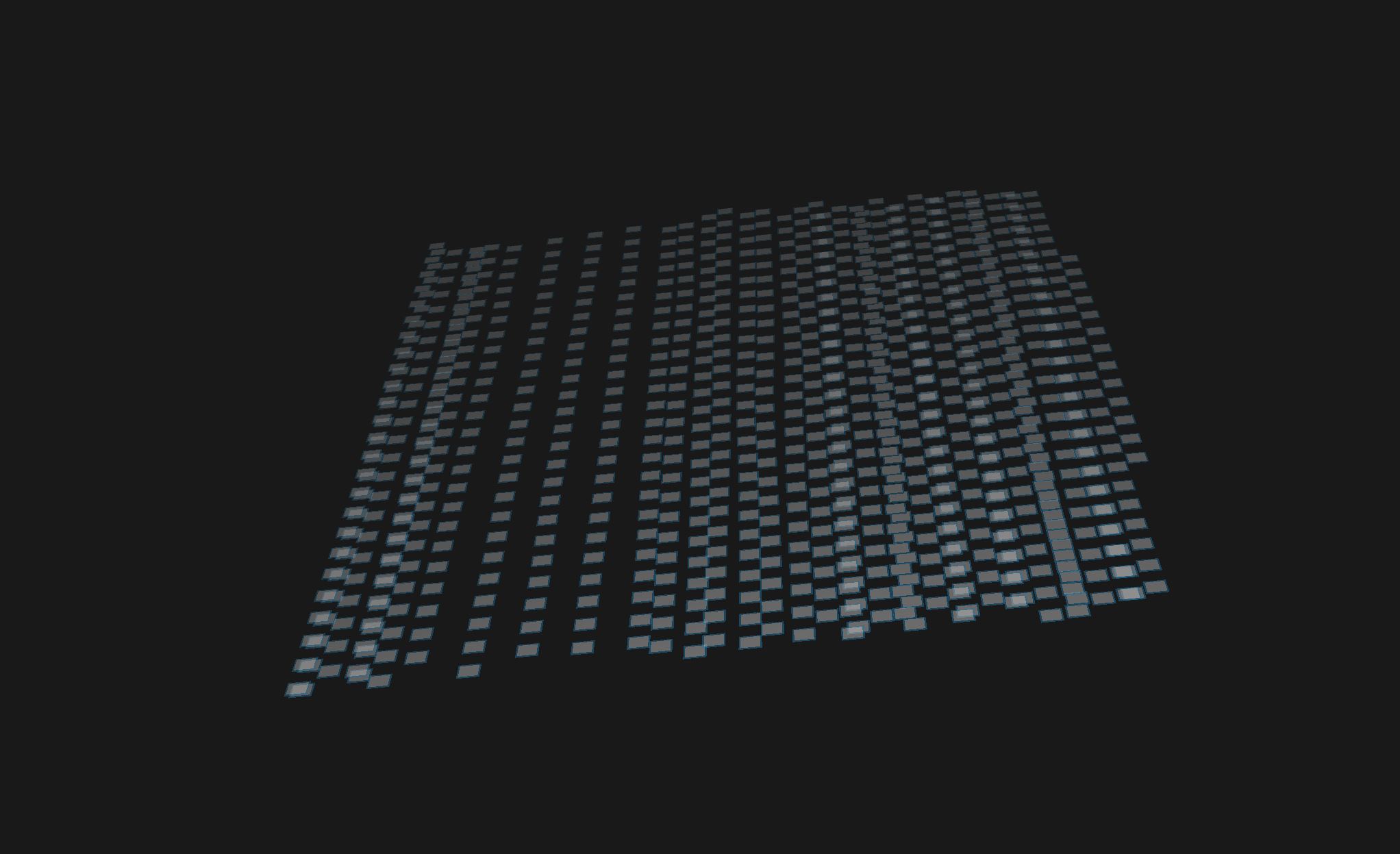
Aerial: Mixed Flight Overlaps
Aerial: Mixed Flight Overlaps and Flying Heights
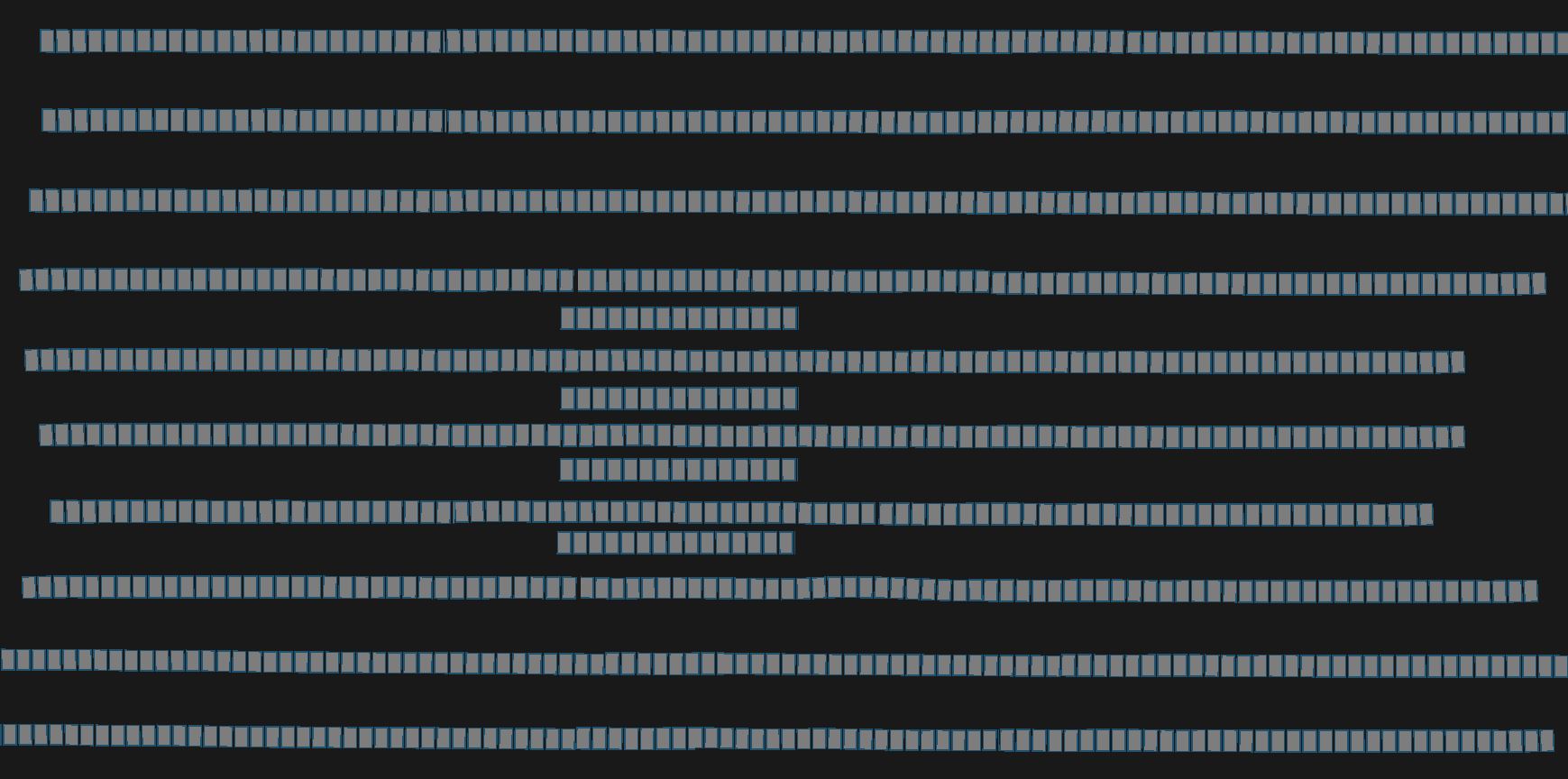
Aerial: Mixed Flight Directions
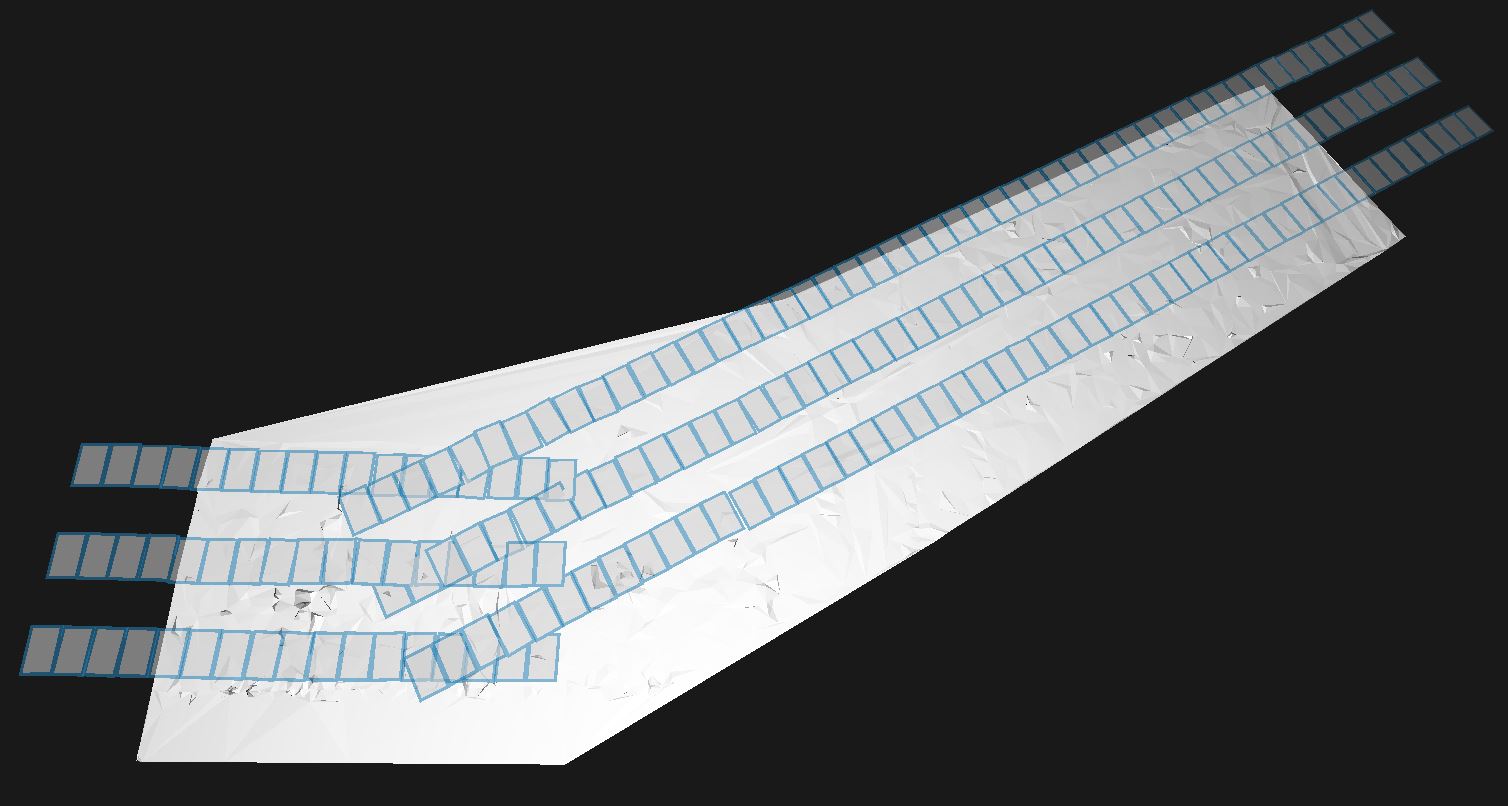
Aerial: Single Strips of Flights for Corridor Mapping
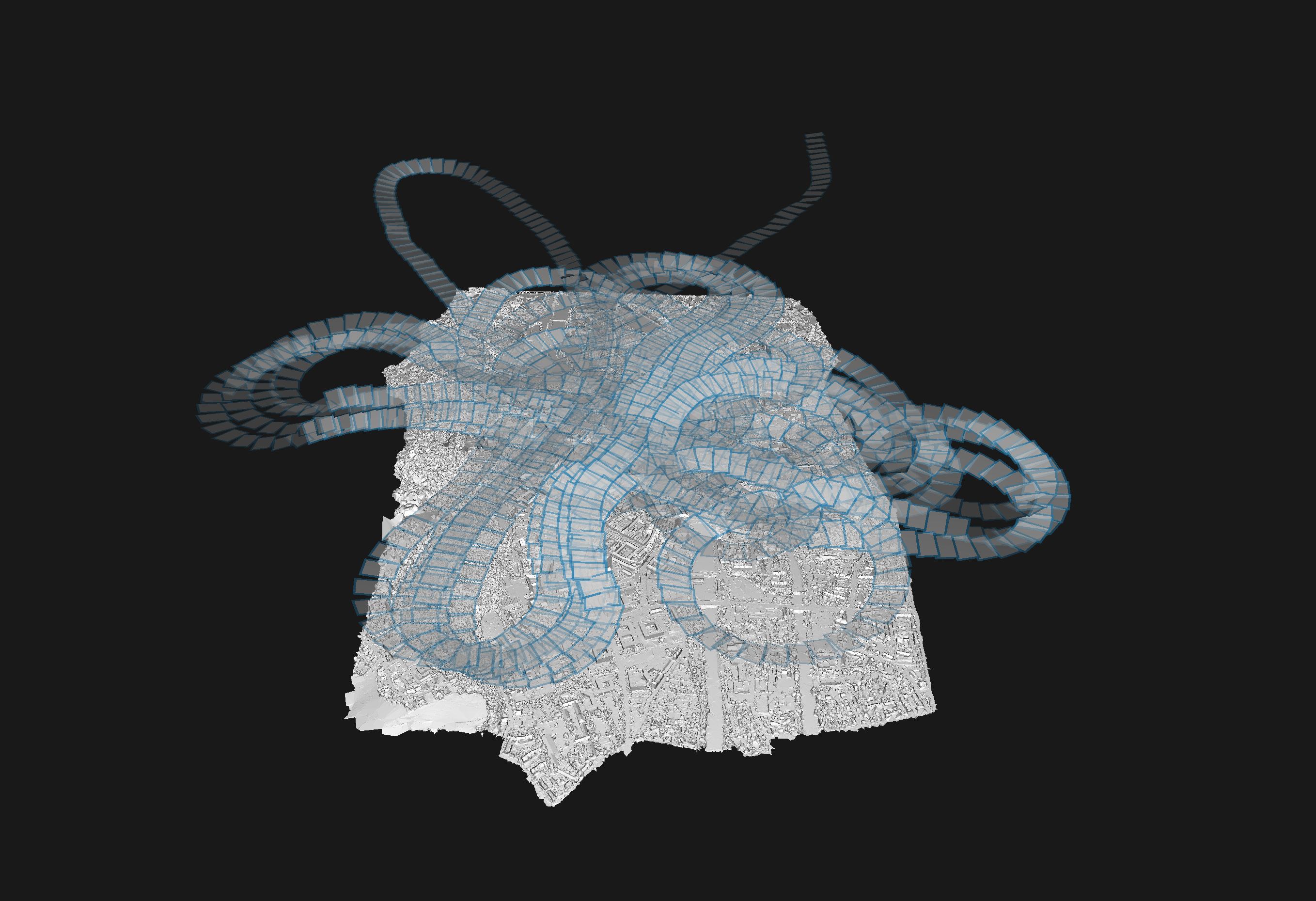
For projects having completely unstructured or circular flight patterns, the Default Scenario should be used for processing.
Scenario Aerial Oblique
The Aerial Oblique scenario is intended for projects where oblique camera systems have been used for the image acquisition and have the following specifications:
Imagery consist of Nadir images mixed with Oblique frames
Image resolution is ≥ 60MP
Typical image formats include (RGB, PAN, RGBI, NIR)
It is designed for handling large scale production.
The Aerial Oblique scenario in SURE implies:
Automatic handling of the stereo-model selection for various oblique flight patterns. Images are paired within the same viewing direction (e.g Nadir, Oblique East, Oblique South, etc.).
Product output by default:
Point Cloud
Mesh
Default tile size: 2000 x GSD
Default processing quality level: Ultra
Supported flight patterns:
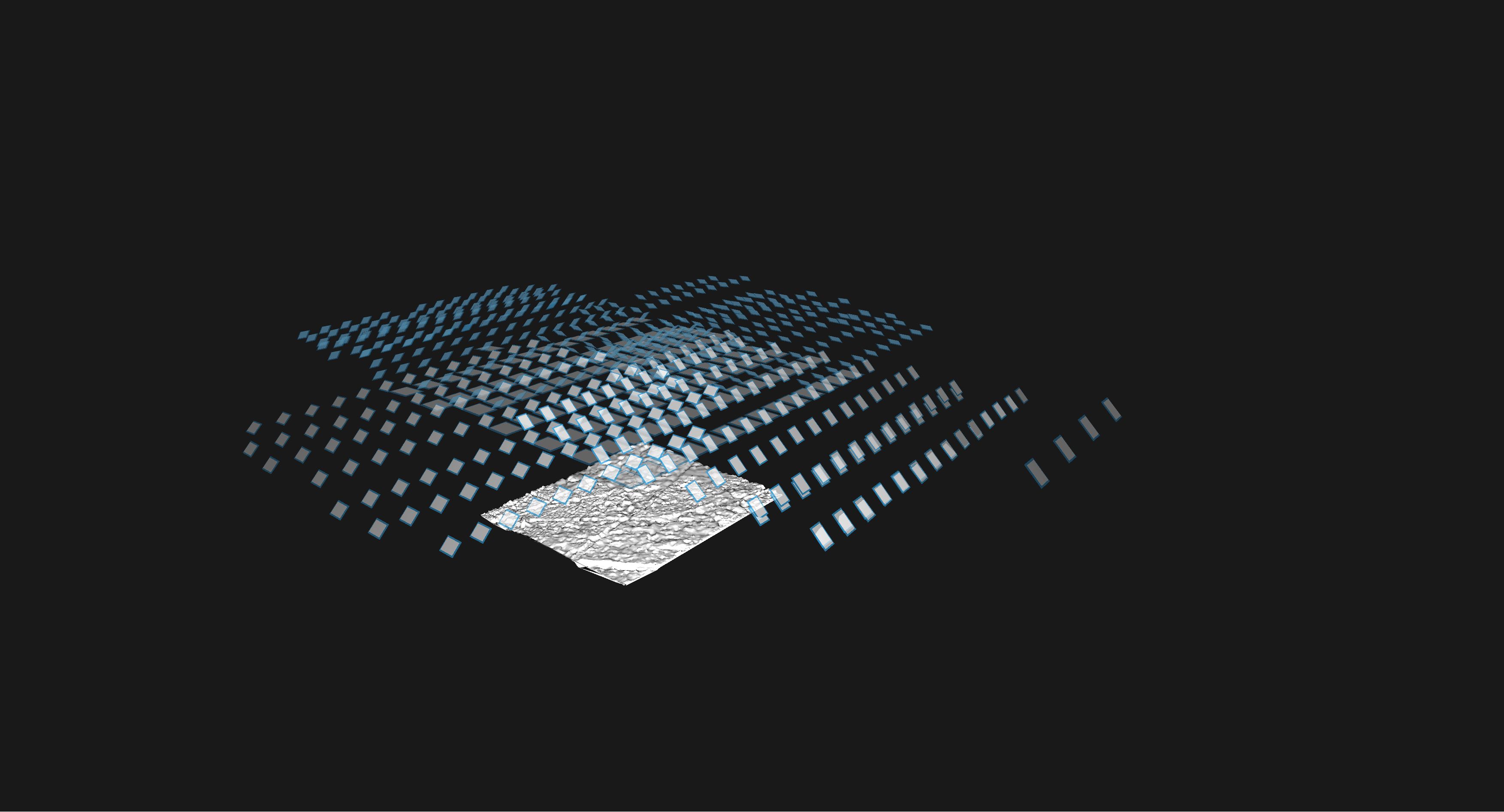
Aerial Oblique: Regular
Aerial Oblique: Mixed Flight Overlaps
Scenario Default
The Default scenario is intended for projects where UAVs or custom camera systems have been used for the image acquisition. This scenario setting is intended for projects with these specifications:
Structured or unstructured flight patterns
Image resolution: a wide range
The Default scenario in SURE implies:
Automatic handling of the stereo-model selection for any image acquisition pattern
Product output by default:
Point Cloud
Mesh
Default tile size: 2000 x GSD
Default processing quality level: High
The default quality level is set to High as it offers an optimal trade-off between quality and performance desired for most UAV projects. To obtain products of the highest possible quality, which demands longer processing times, the quality level should be changed to Ultra.
Supported flight patterns or camera stations:
Default: Structured
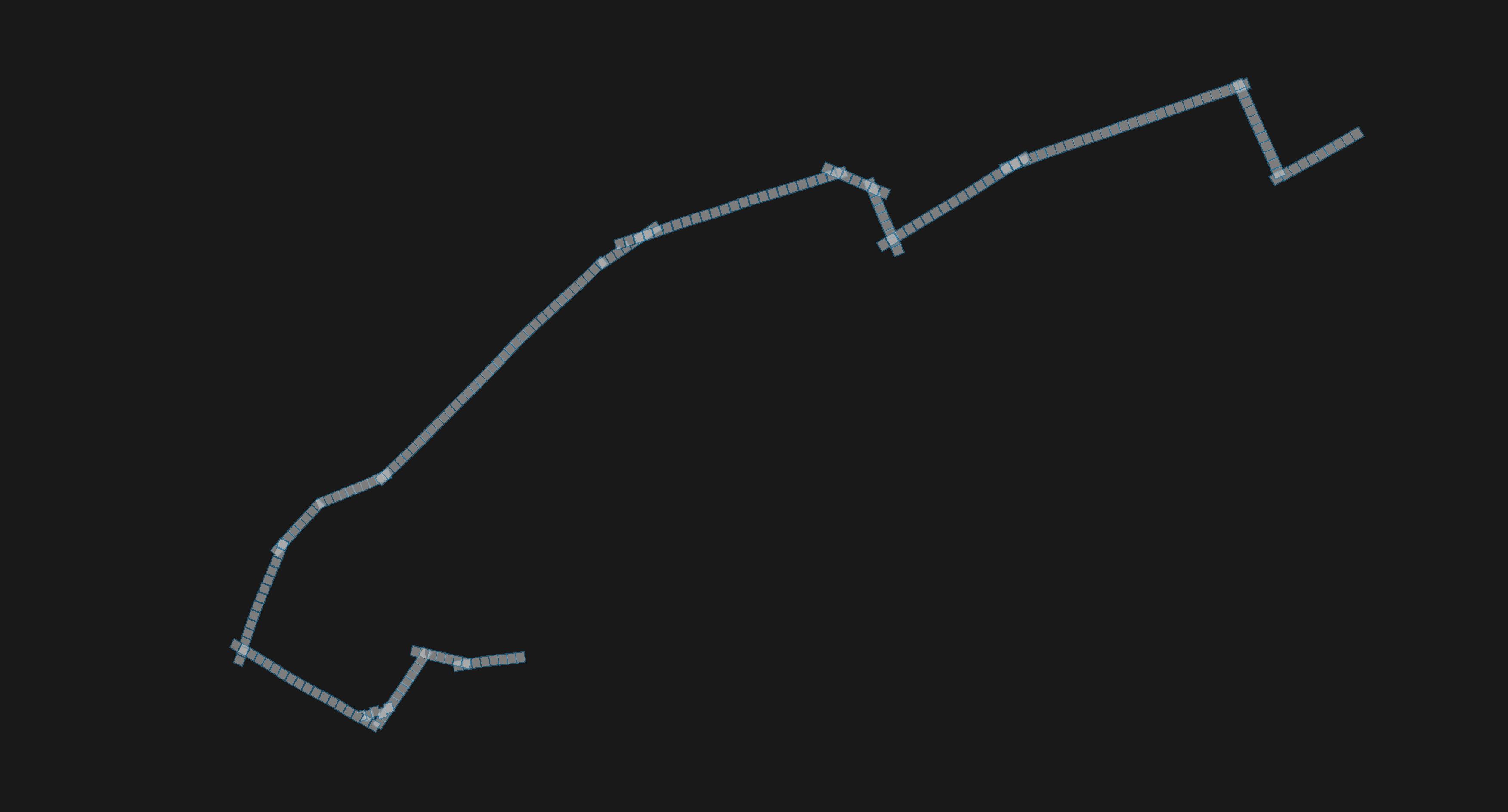
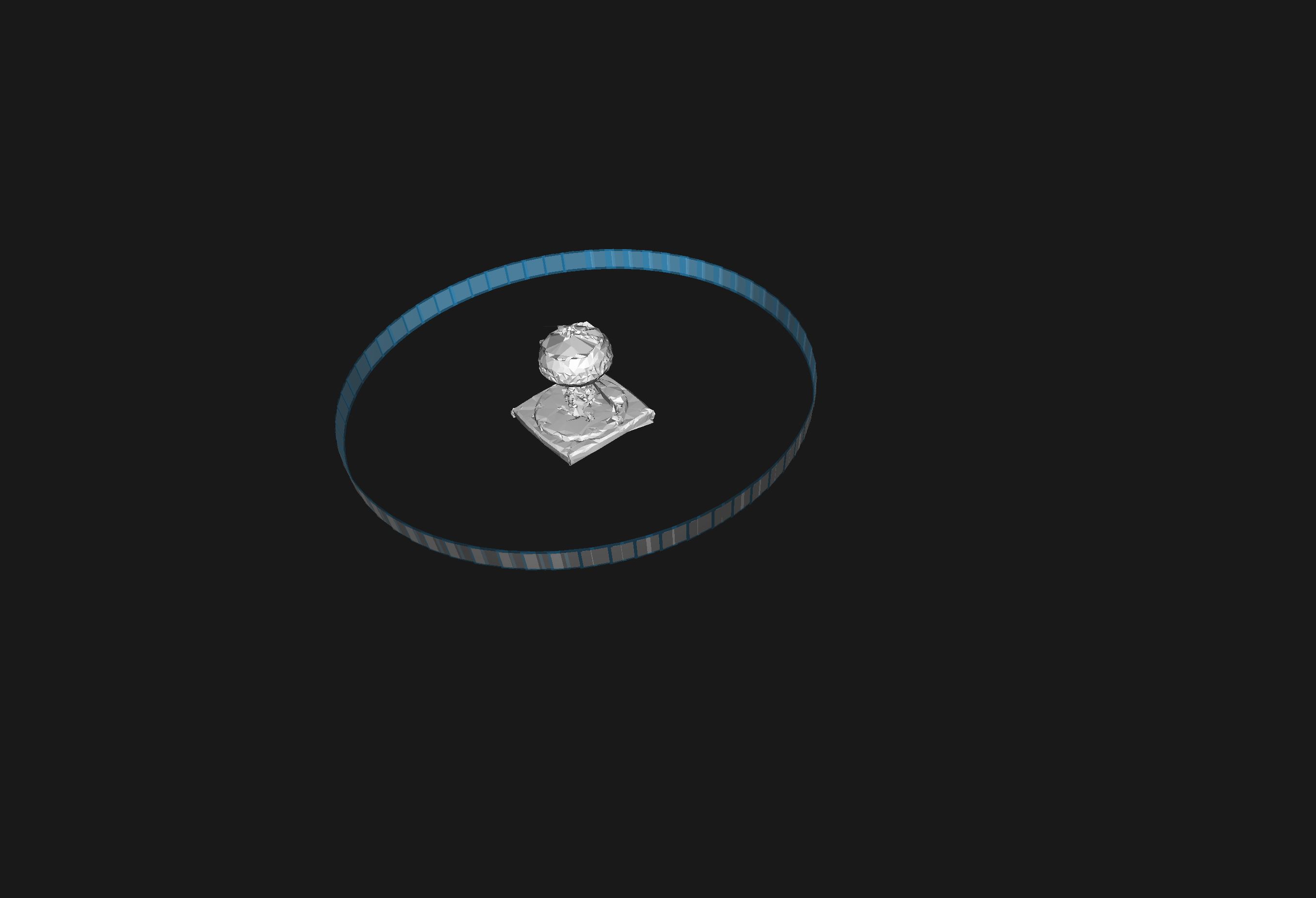
Default: Circular
Default: Unstructured Terrestrial

Default: Unstructured UAV
The presets that are mentioned for each scenario choice (e.g. tile size, enabled workflow, processing quality, etc.) can be optionally changed, using the SURE Interface (GUI or CLI). When doing this, the user should take into account the available hardware, as well as the project's requirements. Consider also performance optimization measures.