LiDAR integration in SURE
Introduction
Since version 3.0, SURE offers the possibility to use LiDAR data to improve the results both in the 2.5D workflow (DSM, True Ortho, DSM Mesh), as well as in the 3D workflow (3D Mesh). The use of LiDAR data is optional and the Dense Image Matching is completely independent from their provision. The LiDAR point clouds are meant as a complement to the Image data and prove to be particularly useful in situations where the geometry of the surface is difficult to reconstruct from images only, due to photogrammetric constraints (i.e. a Photogrammetry 3D point requires at least 2 lines of sight with no redundancy, while a LiDAR 3D point only requires 1 line of sight).
SURE remains a Surface Reconstruction software based on Dense Image Matching (DIM), making use of the advantages of this data source. Furthermore, there is the possibility of improving the results by adding LiDAR data.
Workflow
From a workflow perspective, LiDAR data can be introduced during the DSM and the 3D Mesh processing steps. The table below describes the integration of LiDAR into the SURE workflow (only applicable if LiDAR data is provided and its usage is enabled).
Processing step | Necessary LiDAR data | Affected results |
|---|---|---|
DSM |
|
|
3D Mesh |
|
|
LiDAR data preparation
In a scenario where input LiDAR data have been specified, SURE will proof test the LiDAR data, whether they are valid for later use in the workflow. This step will happen at the beginning of the processing. In case the tests are not passed, the user will be notified about the inconsistencies.
Input Formats
Currently supported formats:
Data | Supported Formats | If LiDAR is enabled, data is required in the these processing steps |
|---|---|---|
LiDAR point cloud files | up to LAS version 1.3 | DSM and 3D Mesh |
LiDAR trajectory files |
| 3D Mesh |
LiDAR point clouds
SURE will use the first return points (first echo) of the LiDAR point clouds, in the idea that it stays consistent with an Image-based Surface Reconstruction product.
If the LiDAR point clouds have the noise points classified as such, then SURE will ignore those points. Otherwise, it is not necessary that the LiDAR input clouds are classified into other classes such as Ground, Vegetation, etc.
LiDAR Trajectory Files
The SBET (Smoothed Best Estimation of Trajectory, from Applanix ) and SOL (Solution, from HxMap) are binary formats storing information about the trajectory of the LiDAR data acquisition platforms. Relevant for the SURE workflow are the positional information in the form of Latitude, Longitude, Altitude (typically in the WGS84 reference frame), and Time information (week seconds).
SURE maps each given LiDAR Point Cloud file to one of the specified LiDAR Trajectories. Therefore, each LiDAR Point Cloud should belong to one and only one Trajectory among the given Trajectories. LiDAR Point Cloud files, which cannot be mapped to a Trajectory will raise an error and SURE will stop the process.
Requirements
Requirement | Explanation / Additional remarks | Required for these processing steps |
|---|---|---|
The same coordinate system for LiDAR point clouds and DIM data |
|
|
Time information and Meta Time information contained in the LiDAR point clouds |
|
|
Specification of the correct Coordinate System of the DIM data |
|
|
LiDAR Point Clouds must correspond to unique Trajectory files |
|
|
Influence of LiDAR data
Data based only on DIM | Data based on DIM and LiDAR |
|---|---|
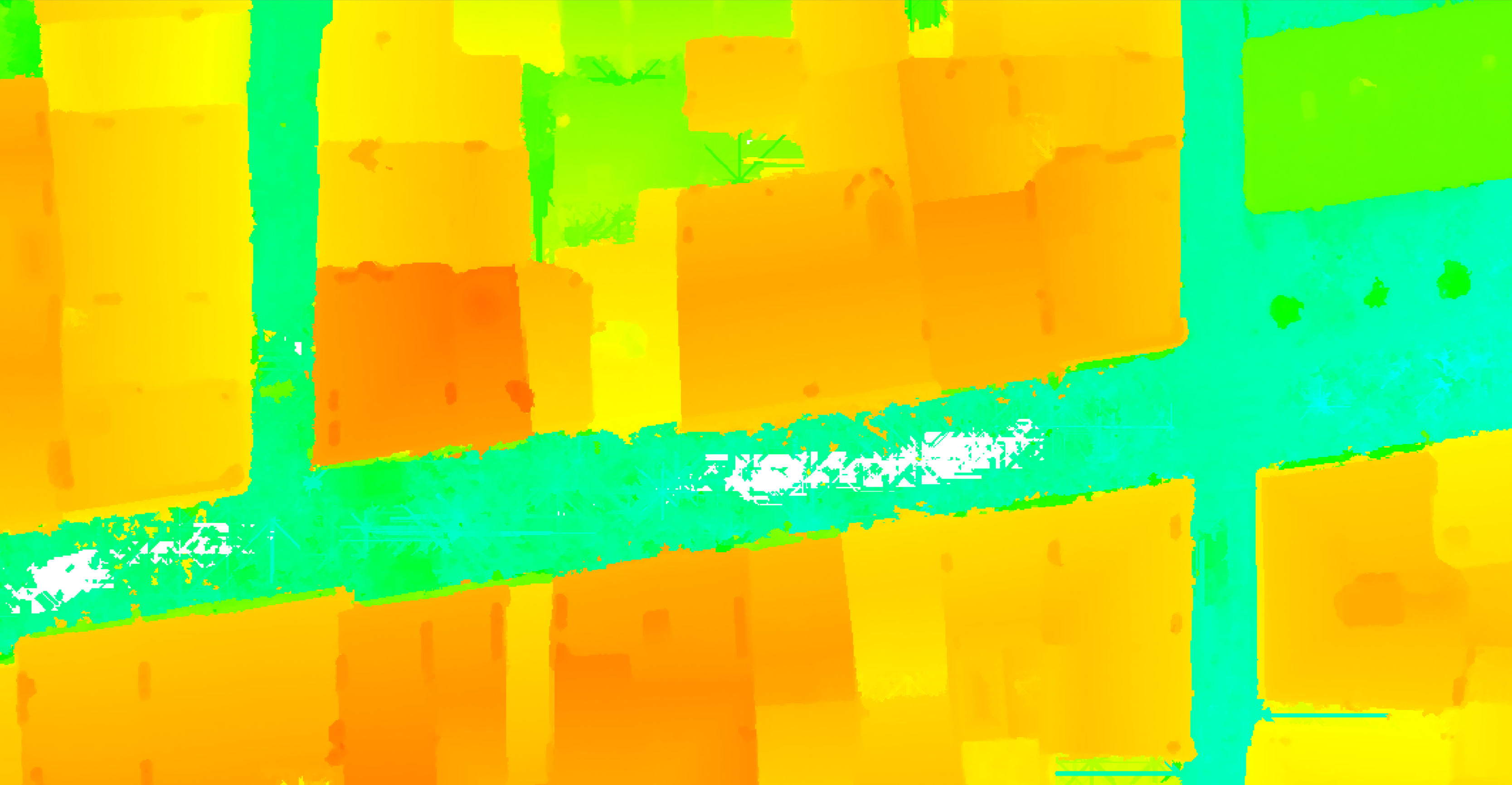 Source: Leica - Bordeaux Oblique dataset (DSM) | 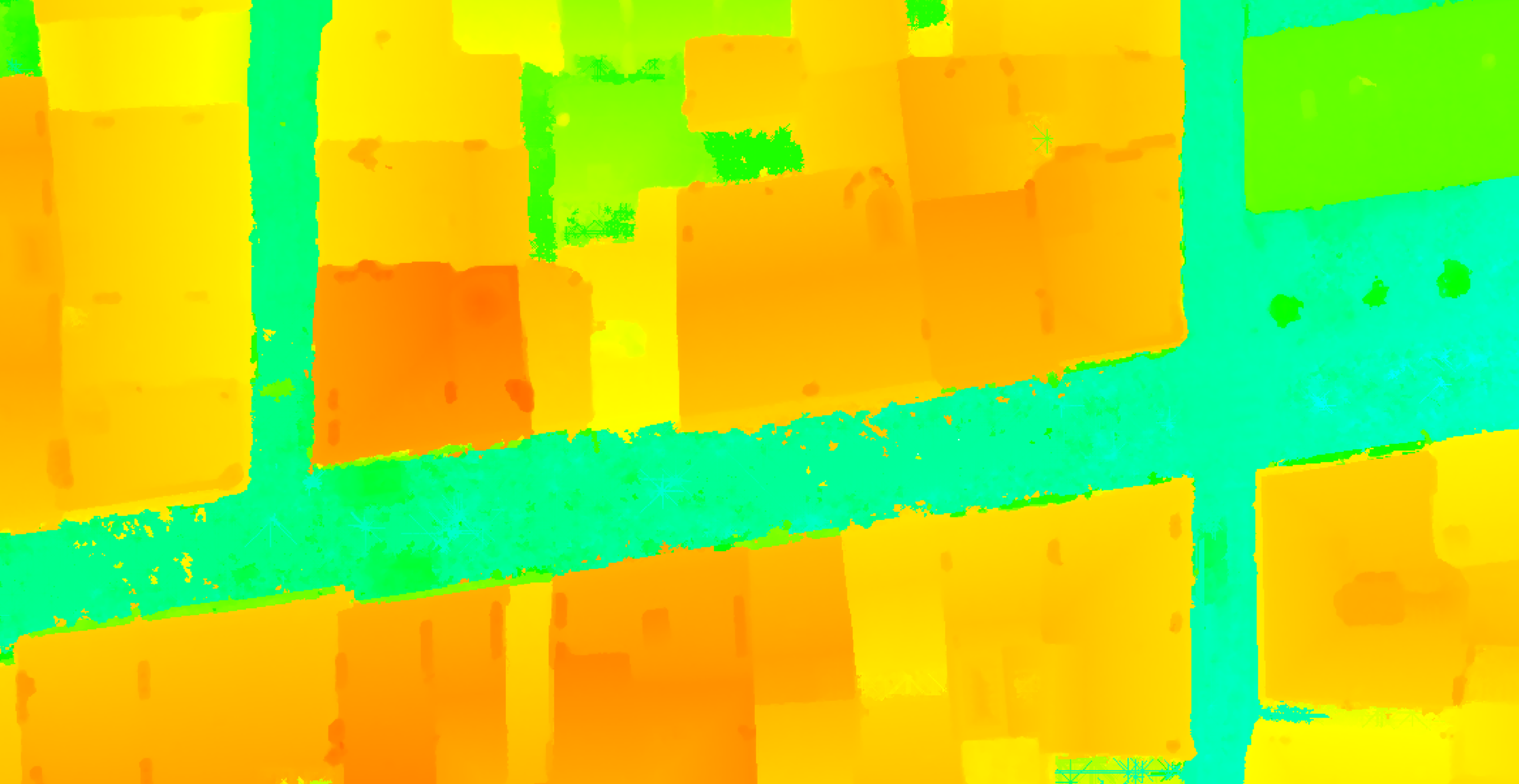 |
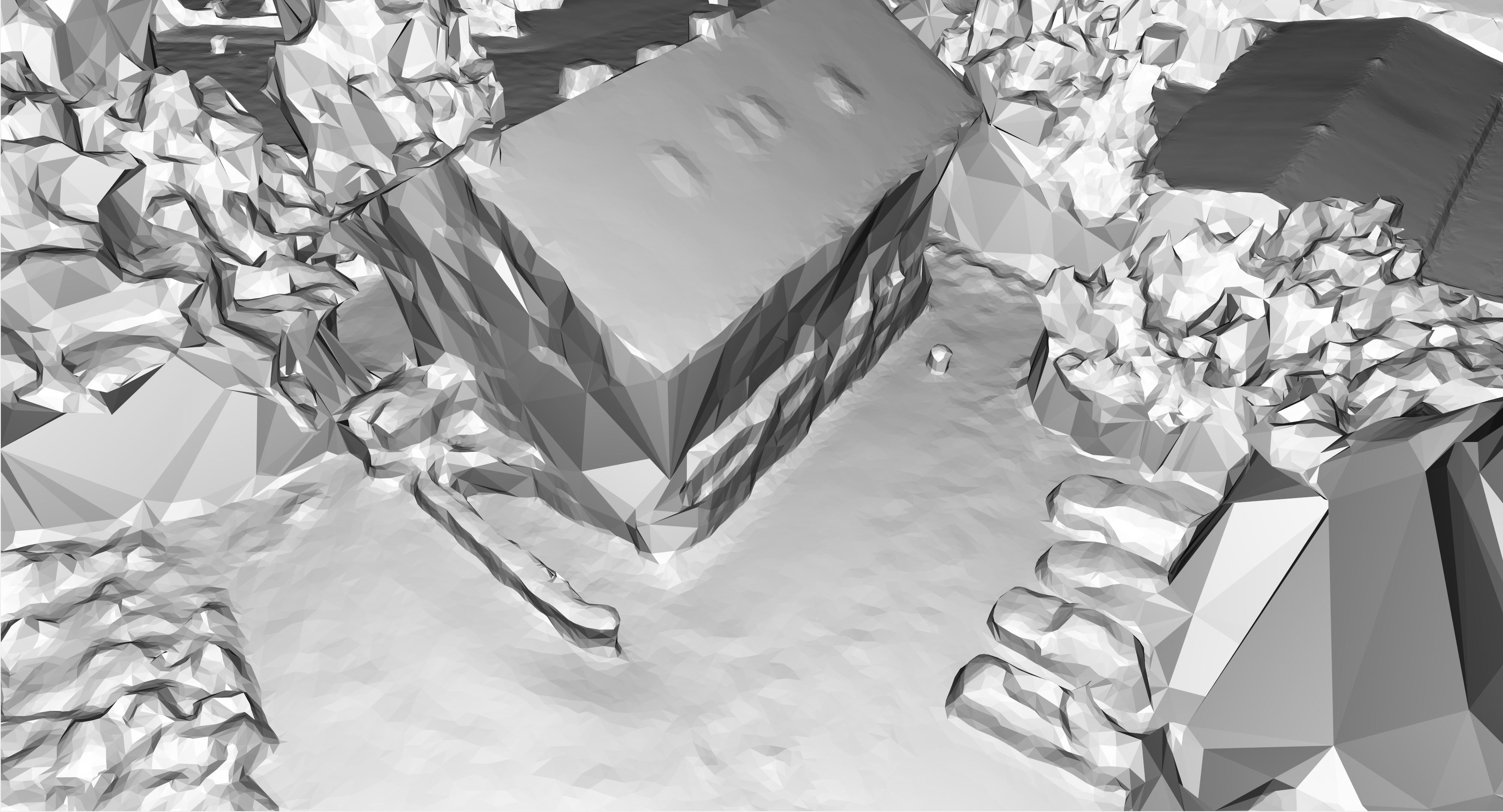 Source: IGI - Betzdorf Nadir dataset (3D Mesh) | 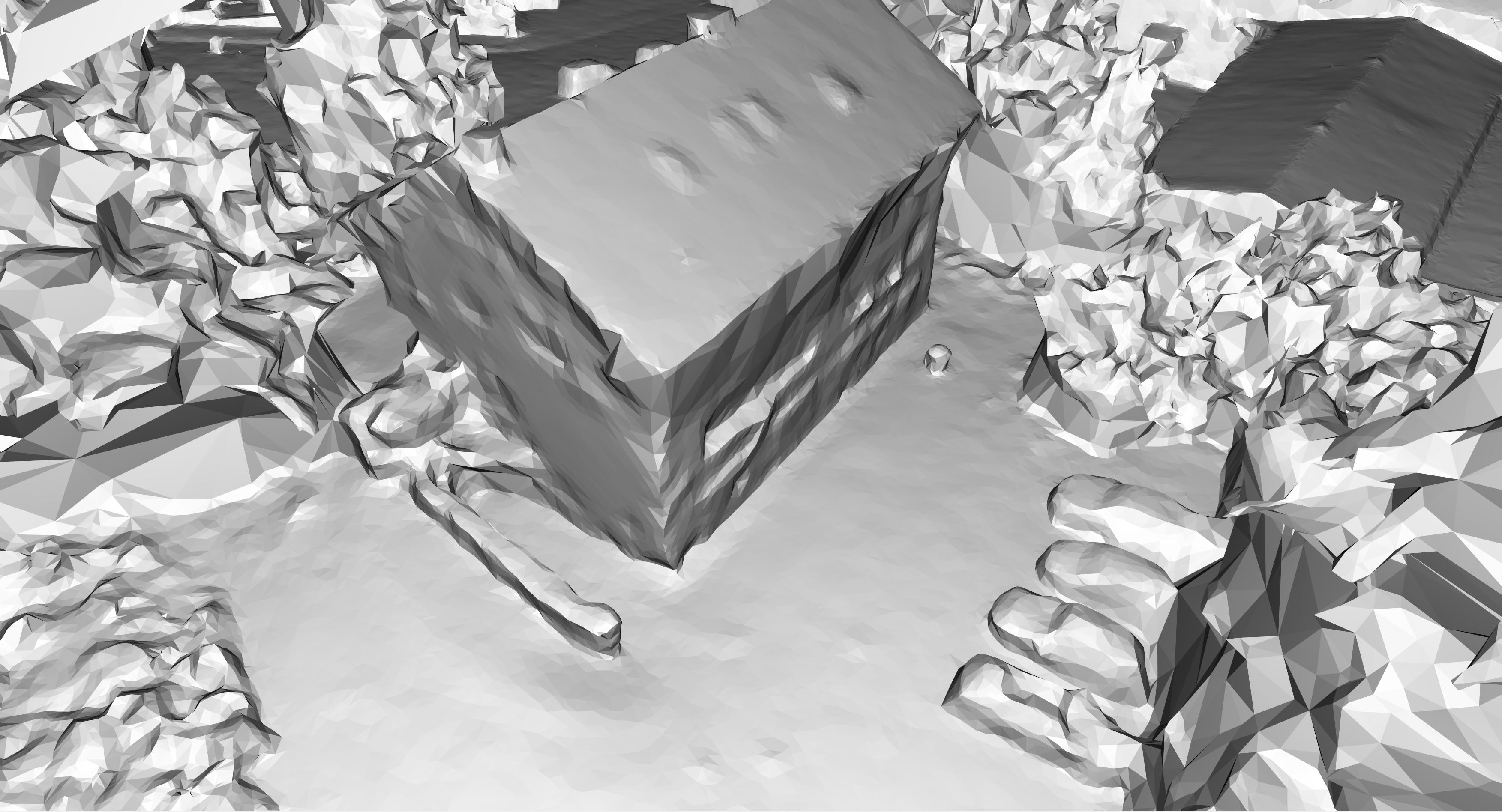 |
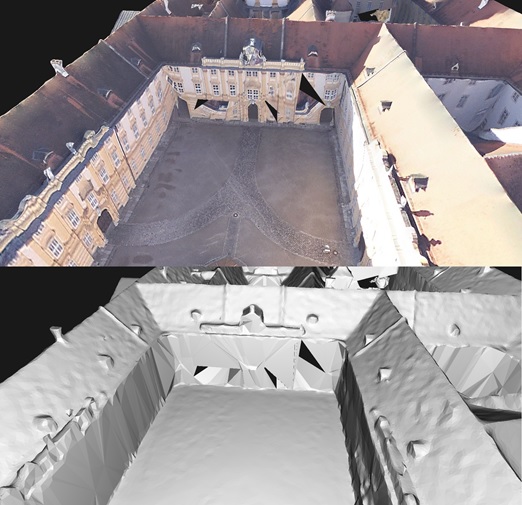 Source: Melk Nadir dataset (3D Mesh) | 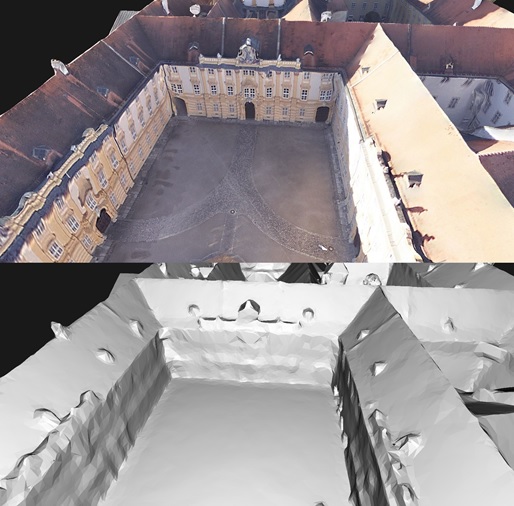 |