Using LiDAR in SURE
Integrating LiDAR into the SURE 2.5D and 3D workflows can greatly improve the quality of the final products (DSM, True Ortho, 2.5D Mesh, 3D Mesh). On this page, we demonstrate how to upload your LiDAR data into SURE in order to complement the image data for a more robust solution. To learn more about the benefits of using LiDAR in SURE please visit our LiDAR Integration in SURE page.
LiDAR data can be provided within the SURE Project definition wizard or through the CLI, as well as in custom workflows using either the 2.5D Tool or the Command Line Modules.
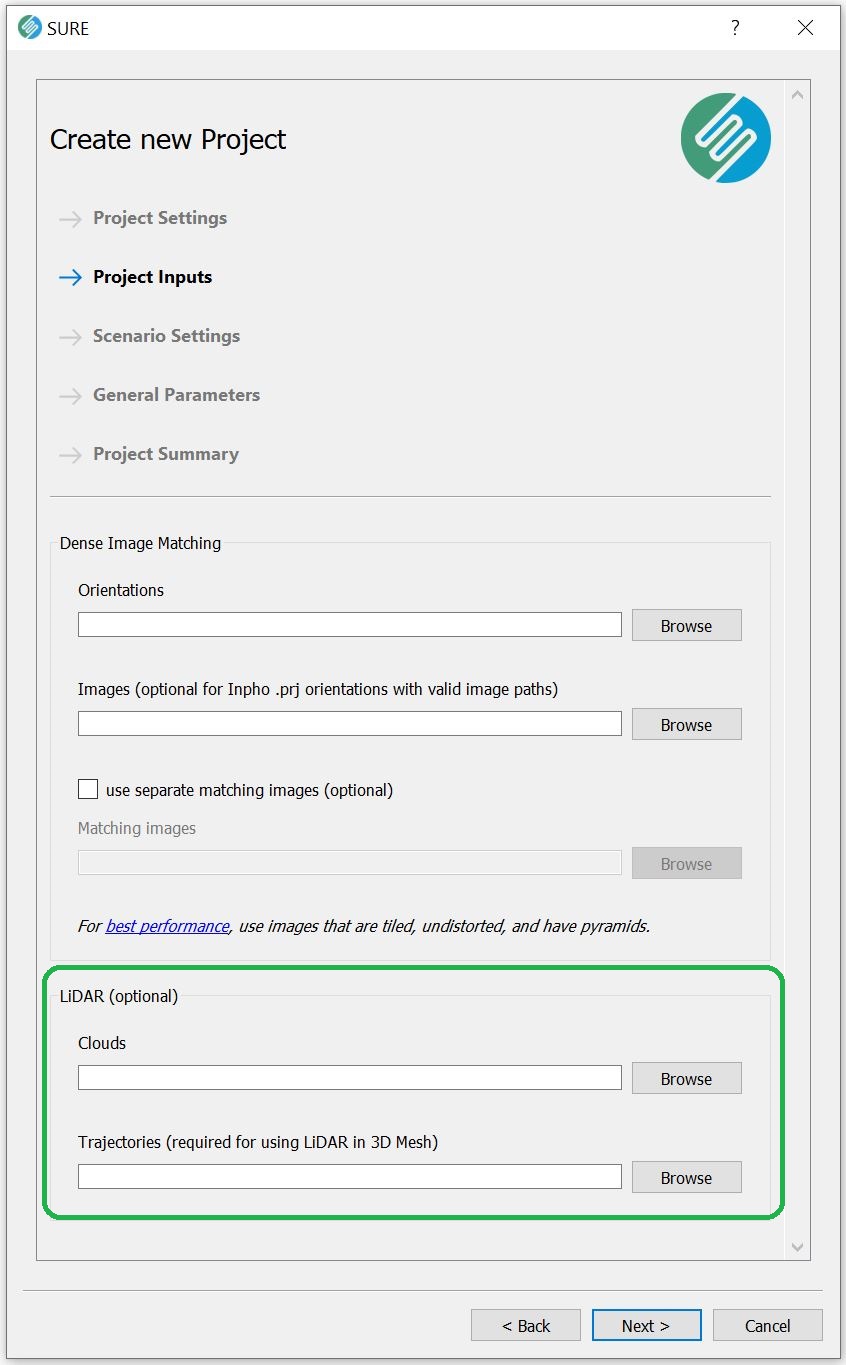
Include LiDAR in SURE Project Definition
The LiDAR point clouds are provided by specifying the parent directory of the .las/.laz files. Alternatively, the user can specify a list text file with each entry pointing to the individual LiDAR .las/.laz files.
Similar for the LiDAR Trajectory files.
GUI
CLI
SURE.exe --project-directory <processing directory> --lidar-clouds <path to list or folder with LiDAR clouds> --lidar-trajectories <path to LiDAR trajectory files> ...
Lidar can also be added through the CLI. See additional information in the Project Setup article.
Include LiDAR in SURE Custom Workflows
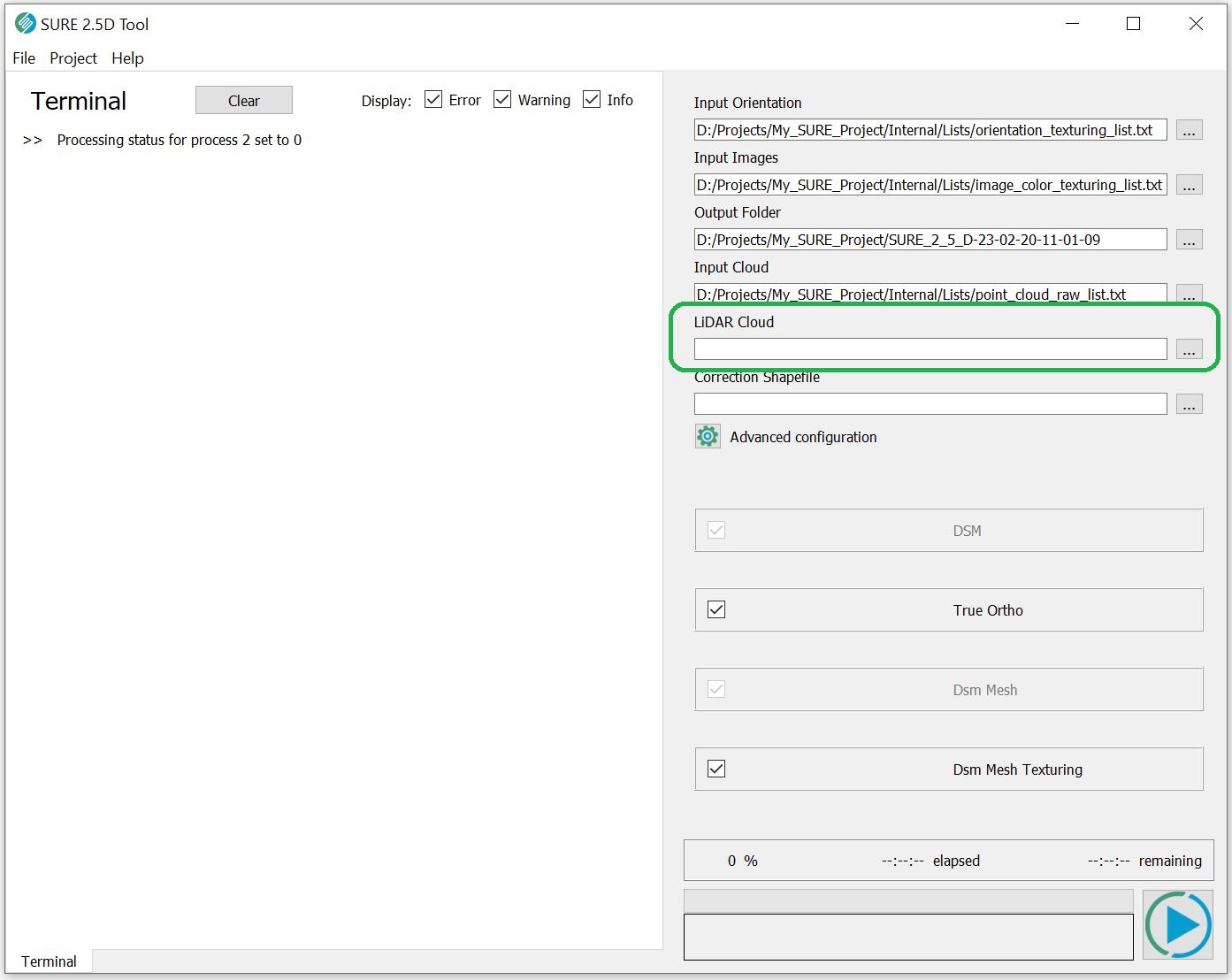
2.5D Tool
Include LiDAR in Command Line Modules
ModuleDsm.exe
ModuleDsm.exe --point-cloud-raw <Path_to Point_Cloud_Raw> --lidar-clouds <Path_to_LiDAR_points> ...
ModuleDsm.exe -h
Command Line Parameters:
-h [ --help ] Print help screen
--log arg (=log.txt) Path to logfile.
--output arg (=.) Path to output folder.
--gsd arg Value for ground sampling distance.
--point-cloud-raw arg (=Internal/Lists/point_cloud_raw_list.txt)
Path to raw point cloud (.las/.laz) or
mesh (.osgb) list, file or folder.
--lidar-clouds arg Path to LiDAR points (.las/.laz) list,
file or folder.
--no-lidar-clouds Disable usage of LiDAR data (modifies
controlDsm.txt)
--waterbody-shapefile arg Path shapefile for waterbody surface.
--controlfile arg (=Internal/Control_Files/controlDsm.txt)
Path to controlDsm.txt control file.
--area arg (=Internal/Control_Files/controlArea.txt)
Path to controlArea.txt area file.
--dsm-required-points-per-cell arg Set DSM required points per cell
ModuleMesh.exe
ModuleMesh.exe --point-cloud-raw <Path_to Point_Cloud_Raw> --lidar-clouds <Path_to_LiDAR_points> --lidar-trajectories <Path_to_LiDAR_trajectories>...
ModuleMesh.exe -h
Command Line Parameters:
-h [ --help ] Print help screen
--log arg (=log.txt) Path to logfile.
--output arg (=.) Path to output folder.
--point-cloud arg (=Internal/Lists/point_cloud_list.txt)
Path to point cloud list, file or
folder.
--lidar-clouds arg Path to LiDAR point cloud (.las/.laz)
list, file or folder.
--no-lidar-clouds Disable usage of LiDAR data (modifies
control3DMesh.txt)
--lidar-trajectories arg Path to LiDAR trajectory files.
--orientations arg (=Internal/Orientations)
Path to orientations folder.
--images arg (=Internal/Images/Match) Path to match images folder.
--stereo-models arg (=Internal/Stereo_Models/Stereo_Models.npz)
Path to the project's Stereo_Models.npz
file.
--point-cloud-meta arg (=Internal/Lists/point_cloud_meta_list.txt)
Path to point cloud metainformation
lists.
--waterbody-shapefile arg Path shapefile for waterbody surface
(only used for LiDAR clouds, DIM clouds
are handled in the point cloud step.
--controlfile arg (=Internal/Control_Files/control3DMesh.txt)
Path to control3DMesh.txt control file.
--area arg (=Internal/Control_Files/controlArea.txt)
Path to controlArea.txt area file.
Processing with LiDAR
If LiDAR data is provided as input during the project generation in SURE, then LiDAR will be automatically integrated into the workflow by default. Thus, the user does not have to change any other setting regarding the processing of the new input. It is also possible to turn off the usage of LiDAR by disabling the ‘Use Lidar data’ in the GUI in the Advanced Settings dialog in the GUI or by using the --no-lidar-clouds command line flag.
Performance optimization
It is recommended that the LiDAR point clouds are tiled in a scheme similar to the one employed in the SURE project. During the DSM step and the 3D Mesh step, the data is processed per tile. As such, SURE will load all the necessary files overlapping with the currently processed tile into memory. If LiDAR usage is enabled, this will include the LiDAR data in addition to the DIM data. Therefore, the most optimal configuration - with minimum impact on processing time - will have the LiDAR point clouds tiled exactly as the DIM data. See also Georeferencing and Tiling.
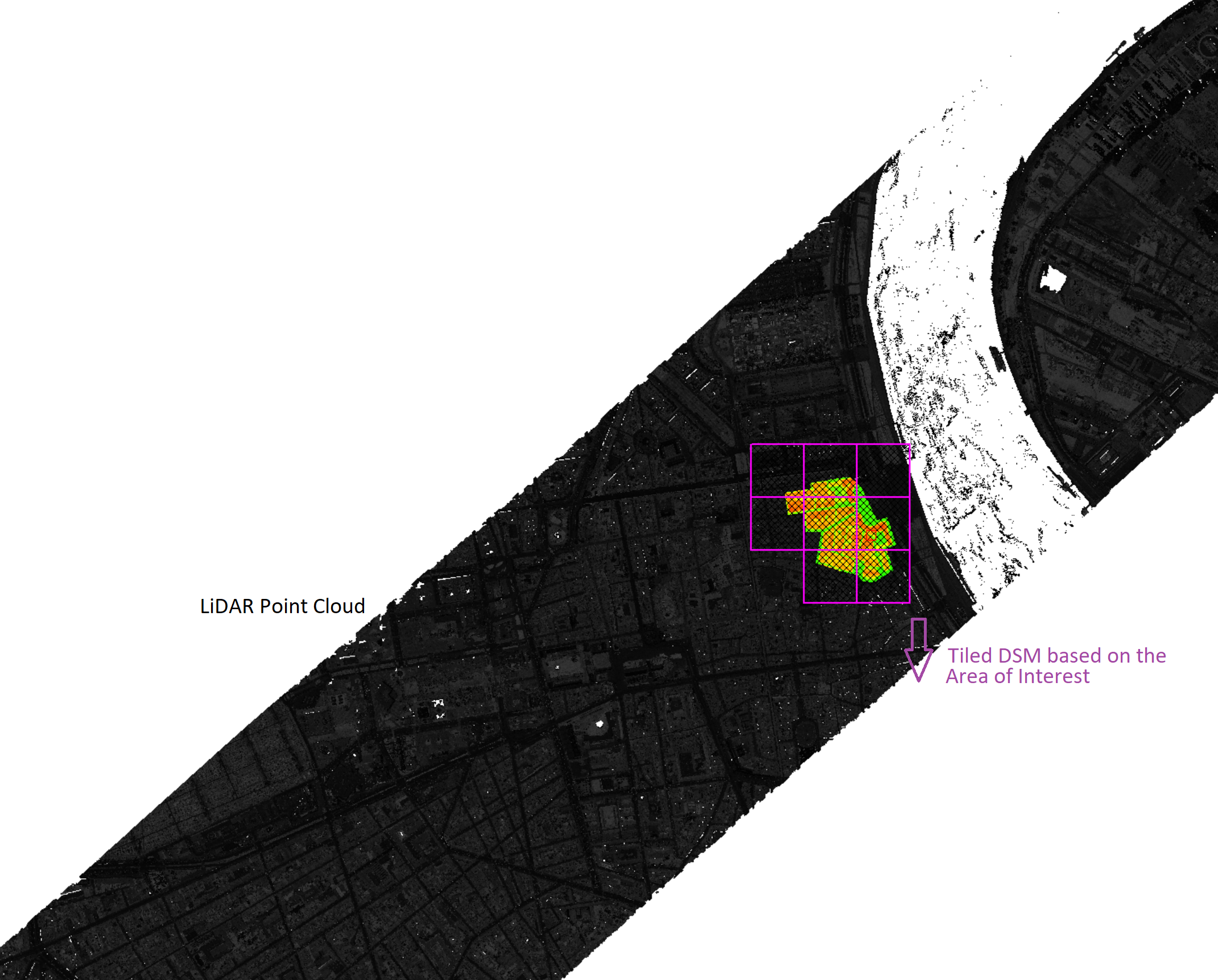
The principle is illustrated below:
Sub-optimal | Optimal |
|---|---|
In the example below, it can be seen that the LiDAR Point Cloud Strips are much larger than the Area of Interest and thus SURE would have to load for every DIM tile the entire LiDAR strip. Source: Leica - Bordeaux dataset | If the user would clip the LiDAR strips in a way that it suits the size of the DIM tile, then the processing of the DSM / Mesh will run faster (also less disk space will be used if Distributed processing is enabled). In the example below the LiDAR strips were clipped and exported as 8 individual smaller parts as the size of the DSM tile. Then a list containing the paths to these clouds was created and used as input in SURE. |
 | 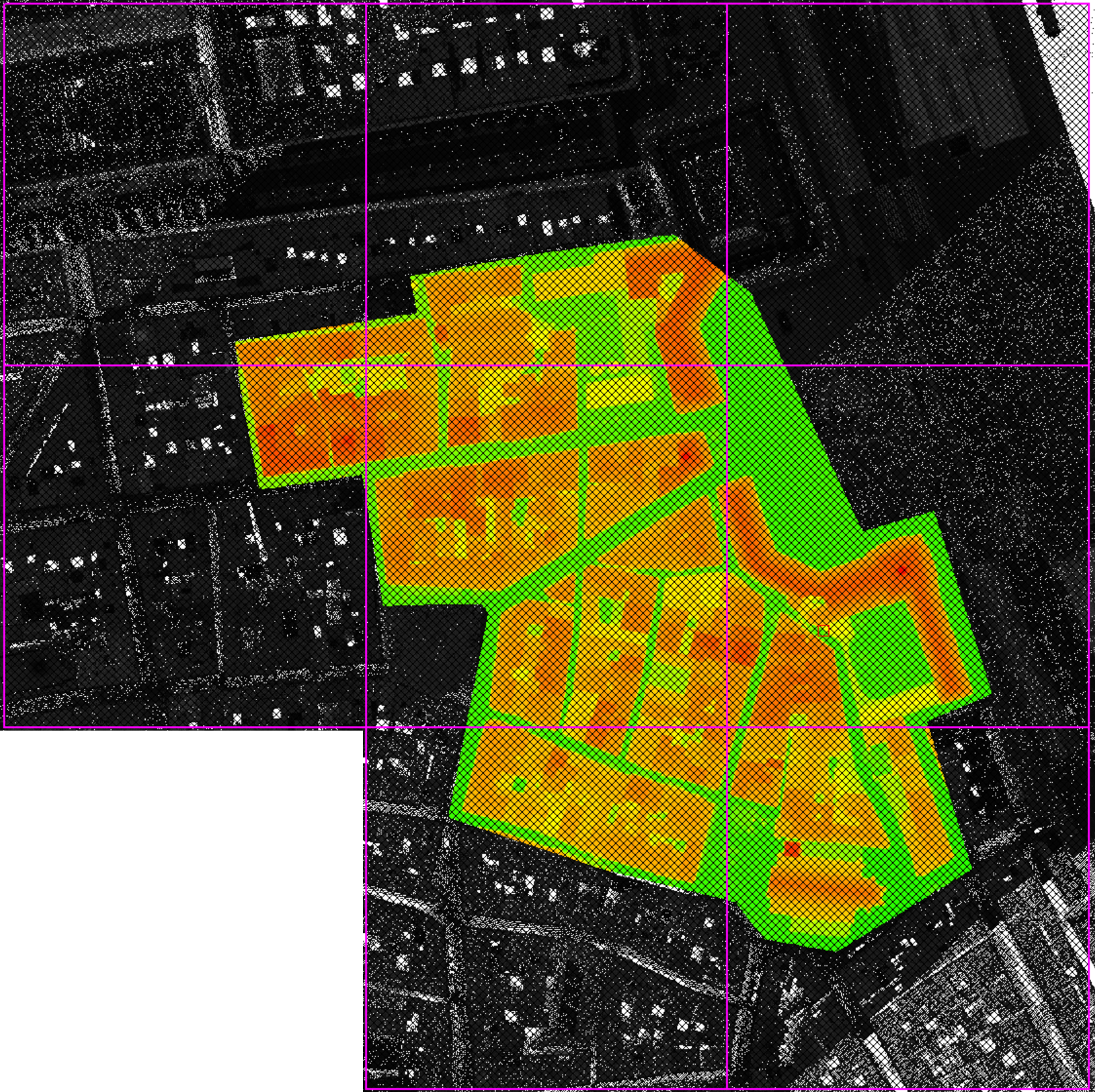 |